


Som un dels proveïdors integrals de FA més professionals de la Xina. Els nostres productes principals inclouen servomotors, caixes de canvis planetàries, inversors i PLC, HMI. Marques com Panasonic, Mitsubishi, Yaskawa, Delta, TECO, Sanyo Denki, Scheider, Siemens, Omron, etc.; Temps d'enviament: dins de 3-5 dies hàbils després de rebre el pagament. Forma de pagament: T/T, L/C, PayPal, West Union, Alipay, Wechat, etc.
Detall de les especificacions
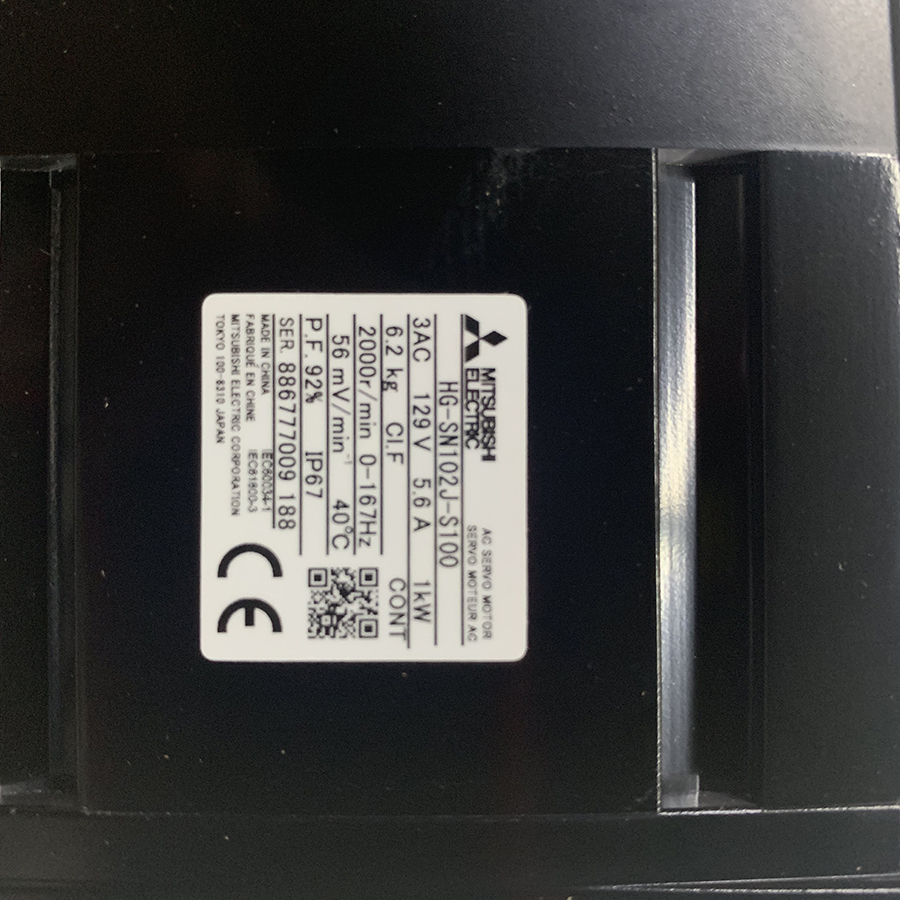
| Ítem | Especificacions |
| Model | HG-SN102J-S100 |
| Marca | Mitsubishi |
| Nom del producte | Servomotor de corrent altern |
| Poder | 5,0 kW |
| Voltatge | 400V |
| Freqüència | 900 (kHz) |
| Sèrie de productes / nom de família | Sèrie MELSERVO JE |
| Corrent nominal | 5.6A |
| Potència activa nominal | 1000 W / 1 kW |
| Grau de protecció | IP67 |
| Corrent màxim | 17 A |
| Càrrega radial màxima | 980 N |
| Càrrega axial màxima | 490 N |
| Parell nominal | 4,77 Nm |
| Parell màxim | 14,3 Nm |
| Resolució | 17 bits |
| Mida | 130 mm x 130 mm x 132,5 mm |
| Pes net | 6,2 kg |
Un senyal de CA constant com a entrada es proporciona al bobinatge principal de l'estator. Tanmateix, com el seu nom indica, el bobinatge de control rep la tensió de control variable. Aquesta tensió de control variable s'obté del servoamplificador. Cal destacar que per tenir un camp magnètic giratori, la tensió aplicada al bobinatge de control ha d'estar 90° desfasada respecte a la tensió de CA d'entrada.
Rotor: El rotor és generalment de dos tipus; un és de tipus gàbia d'esquirol mentre que l'altre és de tipus copa d'arrossegament.
El tipus de rotor de gàbia d'esquirol es mostra a continuació: rotor de gàbia d'esquirol En aquest tipus de rotor, la longitud és gran mentre que el diàmetre és petit i està construït amb conductors d'alumini, per la qual cosa pesa menys. Cal destacar que les característiques de parell-velocitat d'un motor d'inducció normal tenen regions de pendent tant positives com negatives que representen regions inestables i estables, respectivament.
Tanmateix, els servomotors de corrent altern estan dissenyats per tenir una alta estabilitat, per tant, les seves característiques de parell-lliscament no han de tenir una regió de lliscament positiva. A més d'això, el parell desenvolupat al motor ha de reduir-se de manera lineal amb la velocitat.
Per aconseguir això, la resistència del circuit del rotor ha de tenir un valor alt, amb baixa inèrcia. Per aquest motiu, durant la construcció del rotor, la relació diàmetre-longitud es manté més petita. Els espais d'aire reduïts entre les barres d'alumini del motor de gàbia d'esquirol faciliten una reducció del corrent de magnetització.
Sobre la sèrie J4 de Mitsubishi:
Per respondre a una gamma creixent d'aplicacions, com ara la fabricació de semiconductors i LCD, robots i màquines de processament d'aliments, MELSERVO-J4 es combina amb altres línies de productes de Mitsubishi Electric, com ara controladors de moviment, xarxes, terminals d'operació gràfica, controladors programables i més. Això us dóna la llibertat i la flexibilitat per crear un sistema servo més avançat.
-Sobre la sèrie J5 de Mitsubishi:
(1) Progressivitat
Per a l'evolució de les màquines
Millora del rendiment
Estandardització del programa
(2) Connectivitat
Per a un sistema flexible
Configuracions
Integració amb dispositius connectables
(3) Usabilitat
Per a un inici ràpid del funcionament
Millora d'eines
Millora de la usabilitat del sistema d'accionament
(4) Mantenibilitat
Per a una detecció ràpida i
diagnòstic de fallades
Manteniment predictiu/preventiu
Manteniment correctiu
(5) Patrimoni
Per a l'aprofitament de les existents
(6) dispositius
Intercanviable amb anteriors
(7) models de generació
-Sobre la sèrie JET Mitsubishi
-Sobre la sèrie JE Mitsubishi
-Sobre la sèrie JN Mitsubishi










